
First Frame Is the Place to Go for Video Content Customization
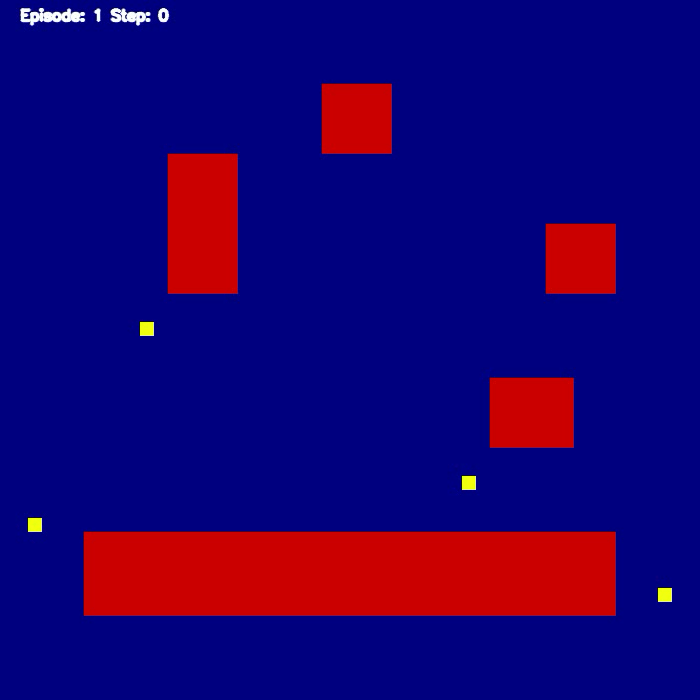
This work studies controlled video generation by composing content from multiple reference images. We propose a novel and efficient formulation that leverages the in-context capabilities of pre-trained video generation models.